We had a lot of fun at the First Robotics Competition at St Ignatius College Preparatory in San Francisco CA. We cannot think of a better way to spend the weekend than watching teams of highly skills robotics engineers compete for fame and glory!

Above is a photo the entrance to St Ignatius located in the heart of the Sunset district in San Francisco.
Below is a video showing one set of the robotic competition.

The goal is for your team to finish as many tasks as possible before the time runs out. Each team has three robots: two that are focused on competing tasks and one that tries to disrupt the other team’s robots. The court is divided in two with each team having one side as their home where they perform their tasks. The tasks are placing the tubes in a slot, throwing a ball and lifting themselves up at the end of the round.

Here is a close up of one of the robots, number 6822. It is amazing to see how many different and creative designs the teams come up with. For example, some receive the tubes from feeding machine while others scoop them up from the floor.
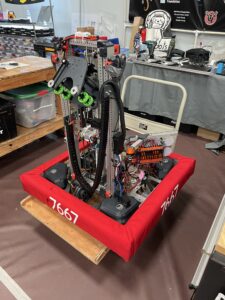
Here is another robot, 7667, waiting to be serviced.

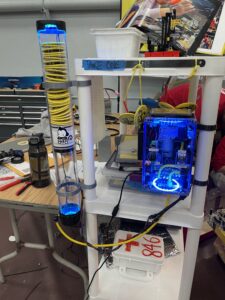
Above is a photo of a typical repair station. Like with the robots, each team has their own layout and collection of tools optimized for their robot’s design. We had serious tool envy as we walked through the pit.
While none of our photos have people, the event was crazy crowded. We made sure to exclude people when taking photos, so missed about half of the teams at the events. Below is a sample of some of the teams there.

The Otter Bots.

The Aztechs from Alameda, California.
And team 846 with the absolute coolest pin dispenser ever!

The Breaker Bots.

The Pirate Robolution!

The Bot-Provoking.

Bora Robotics from Türkiye!

Blue Magpies from Taiwan!
Find your inspiration!


































 Here are some more rocks! We love looking at and picking up all of the different rocks. One particular favorite is a desert rose crystal. We like then because they are very beautiful and remind us of a rose. We also love bismuth because it reminds us of
Here are some more rocks! We love looking at and picking up all of the different rocks. One particular favorite is a desert rose crystal. We like then because they are very beautiful and remind us of a rose. We also love bismuth because it reminds us of 







 And a friendly skeleton watches over the store while you explore!
And a friendly skeleton watches over the store while you explore!