This post is an old one we forgot to publish a while back. Currently, Number Three is controlled by a script that is run on a Raspberry Pi sending commands to an Arduino. But originally Number Three was controlled by a wireless relay switch. We used wireless relays at first because they are simpler and we could just focus on the mechanics of the robots. As our robots got more complex, we had to migrate to Raspberry Pis. This post is a good overview of wiring a relay and even if outdated gives good insights. Also, a wireless relay may be useful in other situations.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please take a look at our disclaimer.
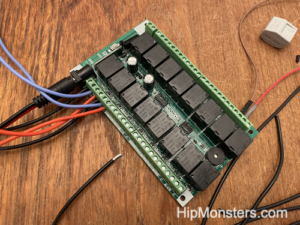
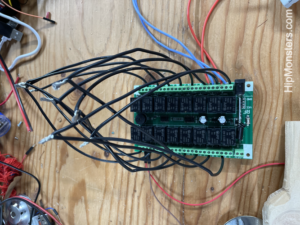
Here is a 12-volt, 16 relay wireless board. It is typically used for lighting but we have other purposes in mind- robots! To begin here are some basics. To control motor you change the power going it. A motor needs positive (red wires) and negative (black wires) energy to work. A relay controls power going to an engine. When wiring a relay the wire that gives the signal (what tells the relay to be on or off) is usually a color other than red or black. In this case the color is light blue.
Honestly there is not too many parts to this build just the relay, linear actuators, wire nuts and a lot of wires. We recommend doing the build in an area easy to clean and free from pets. When you cut the wires little bits of wires can fall to the floor may end up in the foot o a pet.
The wiring for the relays proved to be more difficult than we thought because the wires were slightly thinker than the connection wanted. We had to twisted them tightly to fit them in. If you are buying wire go with a thin grade.
When doing a wiring job of this scale, over 64 wires, it is best have a plan laid out before starting and if possible divide the labor. Our plan was to wire in order or wire type (signal, positive, negative, output). To make it easy we cut all the wires the same length. To attach the wires we used wire nuts but have migrate to using lever connection nuts for quick builds. The wire nuts proved to be too finicky and we don’t recommend them until the final build.
Here is a pile of pre-linked positive wires. Since we wanted to control a linear actuator we need to use two relays to control on the power. To make an actuator extend and retract you need to you flip positive to negative, this is called reversing polarity. But one relay can on turn power on and off. So to be able to reverse polarity we needed to wire XOR logic gate. This is a good overview of how to control linear actuators and here is a good diagram on a XOR XOR logic gate.
Here is the completed relay ready for testing. Make sure all the wires are screwed in tightly and no fray wires are touching before pugging in the relay.
And what better way to test than knock something over and make a big mess!
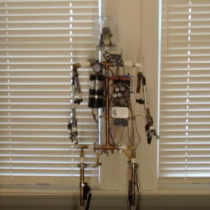
Here is the new controller installed on the back of Number Three. Since we are aiming for a steam punk robot the mass of wires is exactly the look we wanted.
One thing we have always been jealous of is tails. Cats and dogs flaunt them as they strut around waving them in the air. So when making our dragon costume, we wanted a moving dragon tail that seemed alive. Not a dead tail, but one that had a personality of its own.
We searched through our past builds and thought the joint work on our little wooden robots would do the job. We also so some cool designs on the web like this one.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
This build just needed some wood, bolts, wood glue, rubber bands and lots of duct tape.
Since we wanted the tail segments to interlocked we glued two pieces of 2X2 wooden dowels together. Be careful not to put too much wooden glue, it just needs a thin coat. Make sure to give it two days to dry, you don’t want it to come apart when you start cutting.
Measure out the segments carefully. You can vary the lengths depending one what look you are going for. We went with four inches length on the top part and one inch slots on the backside.
Here is a view of the final design. Each segment will have the same “hat” shape.
Each hat will fit together in an alternation pattern. We tried making the segment in “z-shape” but it did not move as organically as the “hat-shape”.
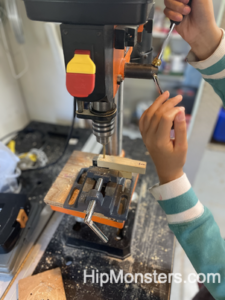
After carefully measuring, we used our trusty drill press to make the holes. Try to make a tight fit for the bolts. If the holes are too big the tail, may stick over time as the bolt cuts into the wood.
Now it is time to assemble! It fits together like puzzle pieces. Make sure to put bees wax on the segments to protect the wood.
Now on to the belt for the dragon tail. To create a base for the tail, we used cardboard and high grade duct tape. An earlier build with standard duct tape did not last very long. First cut out a piece of cardboard about 5 by 8 to help guide you as you “weave” the duct tape. The cardboard does not provide any real support but just helps you remember the shape. The bigger the base, the more stable the tail will be.
Weave strips of duct tape alternating between vertical and horizontal directions. You want to use several layer, enough that it can support the tail.
Next careful cut four slits in the base for the belts. We recommend two belts but one top belt can work depending on your custom. We used camping stapes for the belts with fast release clips to making taking the tail on and off easy. Here is another design that we borrowed element from.
Next punch two holes in the base for the bolts to secure the L-braces. The L-braces will attach the tail to the belt. Use big washers when attaching the L-braces to prevent them from twisting into the duct-tape.
Now, attached the tail using four wood screws. Use small screw and drill guide holes; you do not want to split the wood.
Finally, add two rubber bands at the base to give it some life and your tail is ready to be flaunted!
Here is a back view showing how the base looks when completed.
After finishing Number three, we wanted to make smaller and lighter walking robots. Leveraging what we had learned from building our first walking robot, we made two mini robots, Number Six and Number Seven!
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Because we had a completed robot design it was easy to make sure we had all the parts we needed before beginning. Since Number Six and Number Seven were smaller we were able to spend about the same amount of money but use lighter steal parts. We hoped the reduced weight would make for better walking performance.
The steal tubes also had bolt threads as apposed to pipe threads. Pipe threads are “V” shaped which made it difficult to get a piece tightened pointing the correct direction. With bolt threads we could use a nuts to tighten the connection between the tube and the pivot joints however they were positioned.
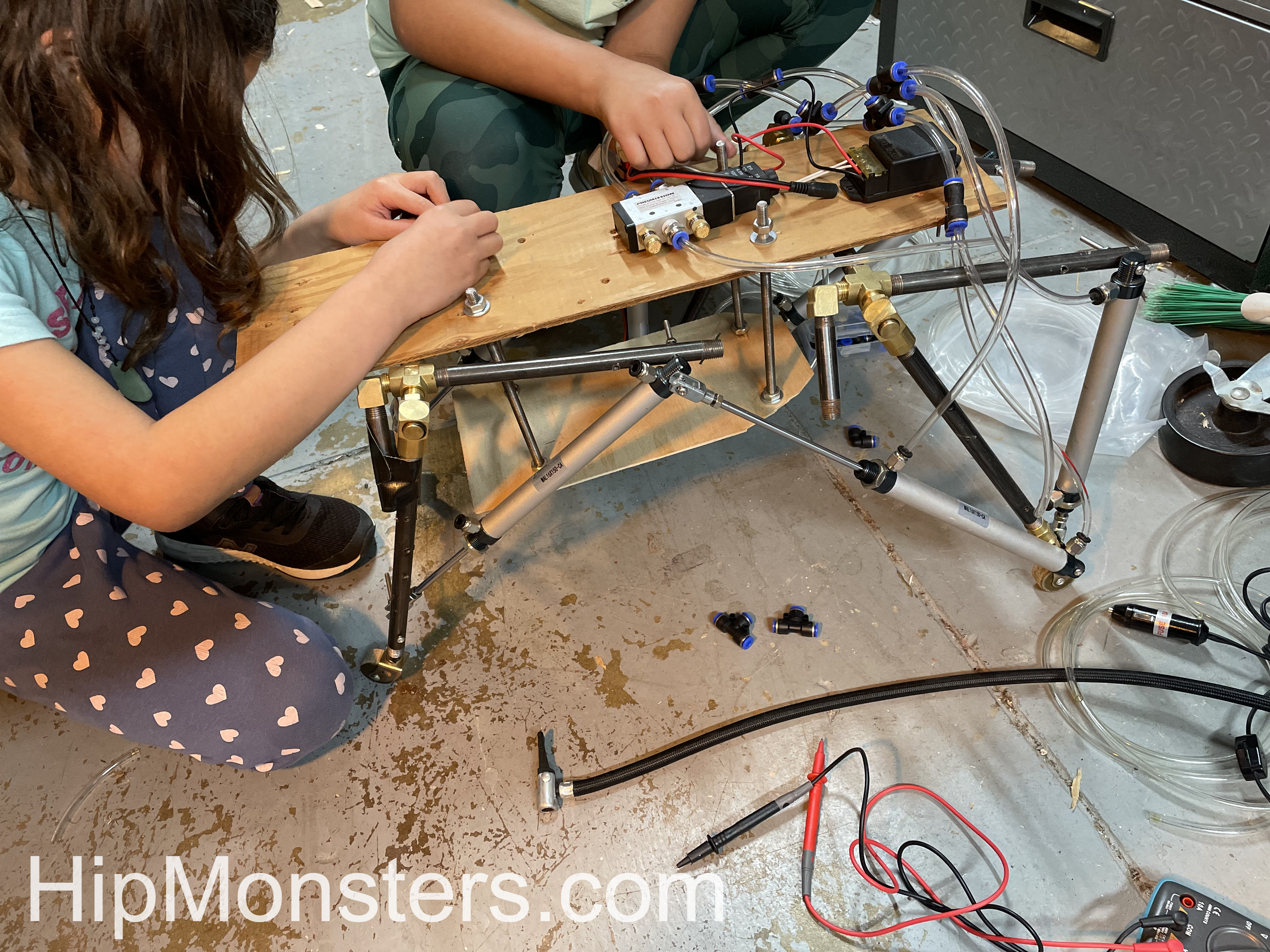
Working as a team the assembling went fast and in less than a day we had the beginnings of two robot. One trick we have learned is to use the floor as an assembling space. We are cramped for space and using step stools can be tricky in a workshop so the floor tends to be safer.
Here is a completed frame. It cannot stand yet and has to be held up. Here we had the initial knee designs. The knee design was important when we were developing the first walker. Later we switched to a tube in the piston rod that acted more like a spring to prevent the leg from over extending. What is critical in our approached is letting the robot fall forward but stop the fall before the robot is in a position it cannot recover from. The sister team learned this trick from a class at school where the teacher said when humans walk forward it is more like a controlled fall.
Now we start on installing the air pistons. We had to repeat this process many time because we kept switching around to position of the pistons and the direction of the air tube couplings. If the pistons are not the same on both side the robot will veer to one side and if the coupling are facing apposing ways the tubing becomes impossible to arrange. We have found facing the coupling up is typically the best orientation.
We did have to modify the piston attachment by removing the peg. This did require a parent’s help as the clip that secured the peg was difficult to remove without breaking it.
Next we began attaching the pneumatic air tubes. When measuring make sure to know were the pneumatic solenoid valve will be attached and account for the full movement of the legs. It is best to do one tube, test it, then do the opposites side. We found as we added tubes we had to change the initial lay of of the tubes. The tube work is a bit of an art form much like wiring a control unit.
Here is a close up of the all the piston installed.
Here is another view of the tubing being fitted and a close up of the pneumatic solenoid valve. Make sure to do clean, straight cuts with a sharp scissors to assure not leakage when attaching to the couplings.
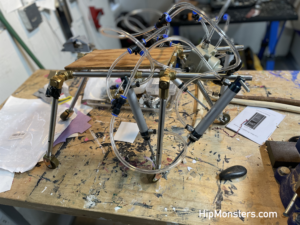
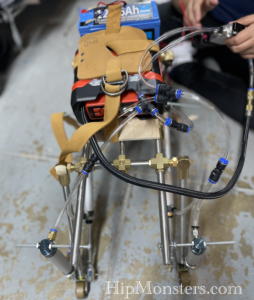
Here is a front view of a completed design for Number Six and Number Seven. For testing we used a leather book strap so we could reposition the components as needed. We also tested a number of different air pumps. This pump, which we did not use in the final design, was the quietest and used the least amount of power. Latter, we switched to another model because this model kept shutting off after prolonged use.
Like with other designed we used a garage door remote controller because it reverse polarity to the pneumatic solenoid valve which switches the air flow from one leg to the other enabling the robot to walk. It is the small black box in the center of the robot.
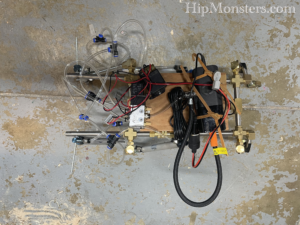
The battery we secure to the underside for protection (the light blue box under Number Six). Instead of doing lead acid battery for Number Six and Number seven, we switched to a 12V 6Ah Lithium Iron Phosphate Battery from our lead-acid battery due to it much lighter weight and increased amps.
Here is Number Six walking in our yard.
Here is Number Seven walking in our workshop.
And here we have all three robots, Number Five, Number Six, and Number Seven going for a walk together! The larger robot is Number Three. Number Seven is in front and Number Six is on the left.
Since we discovered how to make Number Five move, we decided to upgrade Number Three. We tried to preserve as much of the original design as possible, so we didn’t mess with the decorations or redesign the frame. We also made the legs stronger so the robot could support itself easily and won’t fall. Professor Brockenhoff was very pleased with being able to more effectively scare strangers!
Please note, this material is provided for informational and fun purposes only and is not a guide on how to create the designs. Please read our disclaimer.
We started off by disassembling Number Three. Given how Number Three was designed as a framework, it was pretty easy to take apart.
Number Three’s Arm being Upgraded
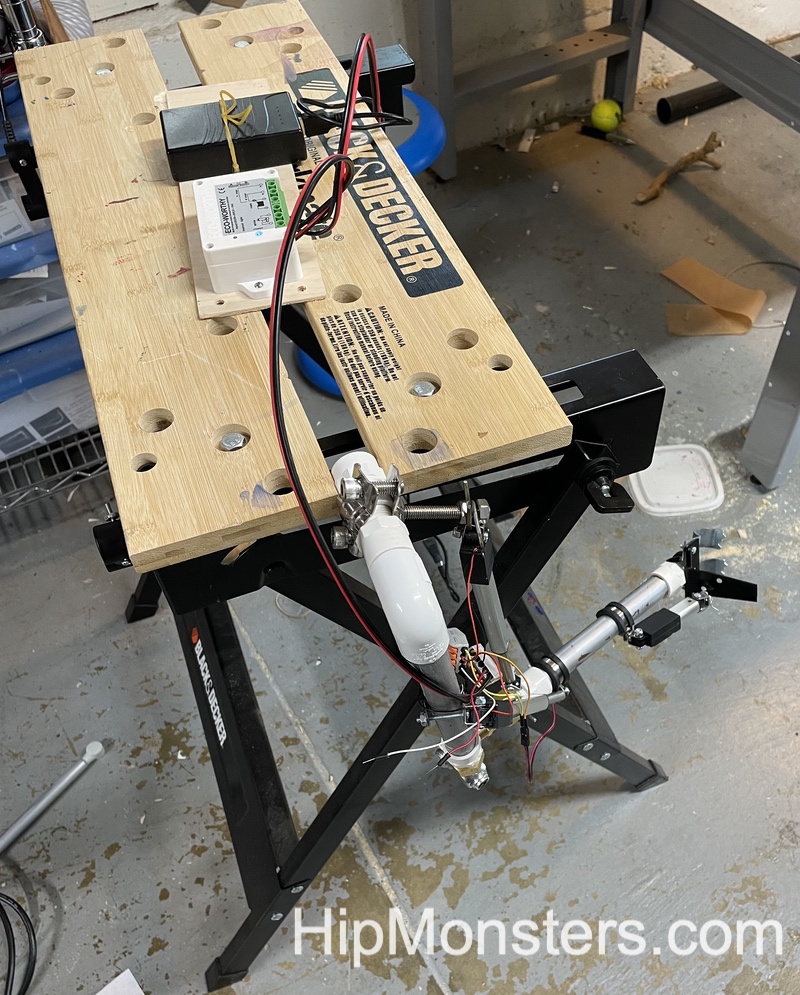
We wanted to upgrade Number Three to make it move. Since walking with two legs is incredibly hard, we decided to only make the arms and hands move. We first used hinges to upgrade the hands so that they could open and close. Next, we had to replace the fixed joints with movable joints. Borrowing from extra part from Number Five, we added flexible joints for pipes to power a air brush. The added weight of the metal join required use adding more support for the legs. We tried plastic joints, but they failed durning testing.
Then we attached lightweight linear actuators to the joints to move them. Given we wanted more controlled movement and a quieter robot for our front parlor, we opted for electronic verse pneumatic power. We attached the linear actuators so that when they extended, the arms reached out and when they pull back, the arms bent.
And finally, for controls, we used a remote control unit for garage doors. Since we need the polarity to switch (the wires reverse, positive/negative to negative/positive) to have the linear actuators go in and out we had to make sure the control unit reversed the polarity not just turned the power off and on.
And now you see the update Number Three testing its arms with Professor Brockenhoff at the controls!
Girl Genius is a webcomic started in 2002 written by Phil and Kaja Foglio and colored by Cheyenne Wright about a world of steampunk mad scientists that build amazing robots. Girl Genius has greatly influenced our art and writing and we recommend you read it. You can read it for free online, or buy physical copies. The authors write a new page every other day, so if you get to the end, make sure to look back to find new pages.
Trilobites are the Heterodyne family sigil (the Heterodyne family plays a central role in the story) which is a fitting symbol of the old and mysterious family.
What we like most about the main character Agatha Clay is that she is really smart and hilarious. She builds lots of cool inventions that do amazing things, and since she thinks differently than the other characters, her dialog is really funny. Our favorite quote is, “But I want to do math now!” Some of our favorite inventions that she had made are a coffee machine that makes coffee so perfect it makes people go mad, a deer robot that looks really pretty but has a bunch of different types of weapons, little circular robots that can make other robots, and a weaponized wagon army controlled by an pipe organ. The fact she is also very dangerous just adds to the fun!
The artwork is fantastic and really brings to life the rich world of Steampunk Europa. What is most impressive is the attention to detail, for example, there are sometimes little monsters on the page, and you have to look carefully to notice them. Also, the steampunk robots look like they can actually work! There are also lots of scenes that are happening in the background, so look carefully, otherwise, you might miss some information! In the beginning, it is black and white, but most of the story is in lots of colors.
Each location is rich in details and lets the reader explore a steampunk world like no other. Our favorites are a huge underwater city buzzing with lots of steampunk submarines and Mechanicsburg, the home of the Heterodyne family which is packed with danger, mystery and dominated by the powerful Heterodyne castle.
Girl Genius comics
The plots take unexpected and fun detours but everything is intertwined, all the characters are somehow connected to each other, and there are no loose ends. The dialogue is hilarious and rich, for example:
Violetta, “So, when can we be sure it is done and we haven’t doomed the Earth?”
Agatha, “Oh once the containment limit returns to normal. As for not dooming the Earth- well- that is more a lifelong goal, really. But so far so good.”
Humongulus: Humongulus angry? Never! You have used guile! Tactics! Awareness of the landscape! Humongulus is impressed!
Franz: Good ’cause with those arms you could punch me into next week.
Humongulus: You know the very sole of Humongulus.
And it is not just us who thinks Girl Genius is great, it has gotten multiple Hugo awards!
The Hugo Award!
The best part of the world is the crazy robots and monsters. There are lots of weird monsters that just live alongside everyone else, and crazy robots are an everyday sight. The robots and monsters are central to the story and some are main characters who act and think very differently than humans which adds to the realism.
Our favorite little clank
This is a picture of a little clank (robot) that the main character made. Girl Genius is in a steampunk world and has cool robot illustrations. We were so inspired by Girl Genus’s cute and cool-looking robots, we spent two years designing and building our own working steampunk robot Number Five !
Inspired by the Boston Dynamics robot videos, steampunk art, and Girl Genius, the HipMonster team set out to make their robotic dog walk to take for a walk on our city street. This project ended up being a lot harder than we imaged and took two years to complete. This greatly impacted our work on the HipMonsters’ website which is just now being updated with new content. So, finally, we give you the making of Number Five!
Please note, this material is provided for entertainment and informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Getting Started
Base supplies to get started:
Brass Pipe Fitting, 4-Way Tee, Female Pipe (1, 1/4″ x 1/4″ x 1/4″ x 1/4″ NPT)
Brass Pipe Fitting, 90 Degree Barstock Street Elbow, 1/4″ Male Pipe x 1/4″
Brass Pipe Fitting, Barstock Tee, 1/4″ x 1/4″ x 1/4″ NPT Female Pipe
Black Steel Pipes ,close nipple pipe, 1/4 in. x 8 in, Black, 5 Pack
Black Steel Pipes, close nipple pipe, 1/4 in. x 6 in, Black, 5 Pack
Black Steel Pipes, close nipple pipe, 1/4 in. x 2 in, Black, 5 Pack
Hex Nipple Coupling Set – 1/4-Inch NPT x 1/4-Inch NPT,Solid Brass, Female Pipe
3/8 Inch Stainless Steel Cable Clamp
90-degree Swivel 1/4-Inch Male NPT x 1/4-Inch Female NPT
Clear 6mm OD 4mm ID Polyurethane PU Air Hose Pipe Tube Kit 10 Meter 32.8ft
Pneumatic Rotary Lever Hand Valve 1/4” N PT Air Flow Control 3 Position 4 Way
Pneumatic 16mm Bore 150mm Stroke Air Cylinder Double Action
Bike Pump
Building on our experience creating Number Three, we used piping to build the skeleton for the robot. To make it stronger to withstand the force of walking we used 1/4-inch steel pipes and pneumatic pivot joints rather than PVC tubing. After that, we assembled the legs using the pivot joins to allow the legs to move.
Assembly begins!
After the legs were completed, we built a spine to help attach the legs and provide an attachment platform for the batteries, controller, and engine.
The skeleton is coming together
When Number Three moved, the legs would frequently come loose so we made sure to be attached tightly to the spine. We knew from other robots we built that the vibrations of a running robot tended to unscrew bolts and screws. So, getting everything put together as tight as possible is essential.
Final tightening of the frame
The spine takes a little patience to screw together because we used three parallel sets of pipes for strength. It proved difficult to screw them in at the same time and the best approach was to take it slow and calmly.
Side view of the completed skeleton
This is the side view of Number Five with most of the pneumatic pistons in place. We had two powering the back legs and four to power the front legs which did most of the pulling. We found from the full-scale test pull was better than push for control. If a front leg got stuck and the back legs still pushed forward the robot would veer to the left or right.
Below is a top view. The front part of the skeleton does not have a spine. This was originally to enable us to adjust the strides of the legs but that ended up being too finicky and we instead locked them in place. Sadly, we don’t have a clean attachment point for a head if we ever want to add one.
Top view of the skeleton
Next, we started connecting the air tubes to the pistons. We first laid out how the piston would attach to the frame then cut the tubes to link them to the engine. We made sure that they were long enough not to get yanked out, but short enough not to get caught in the robot’s legs.
Fitting the pneumatic tubes
The tubing took a few attempts to get the length right. It is better to be too long than too short, so we have a bag filled with little bits of extra tubing. The tubing connects the piston to the engine. In the beginning, the engine was a bike pump powered by a kid but the final version would have a car air pump.
While attaching the pipes we recommend color coding the pipes with a little bit of nail polish or colored tape. You want the legs to be connected oppositely. If a right piston is rigged to push when the air is redirected, you want its mirror to pull.
Each piston has two connections:
one at the top which makes the rod push out,
one in the middle pulls the rod back.
Close-up of an Air Piston
Below is a gif of two pistons connected in opposition. This will enable the robot to walk with a stride.
Testing the pistons
Below is the first full-scale test. We used a bike pump to better control power. The bike pump worked remarkably well for most of our small-scale tests and was significantly quieter than the air pump. Plus it is cool to power a robot with a bike pump. As you can see… this test failed hilariously.
Test number one
The first test showed that controlling double-jointed legs was very difficult so we decided to shorten the legs as well as do tons of additional modifications. With lots of tubing, it tangles easily and it is hard to figure out where the problem is. We also added knees to stop the legs from overextending and falling.
After tons of modifications
The second full-scale test was much more successful and operated as we expected. This floor has a slight downward tilt but it also works in the opposite direction; admittedly a bit slower. It is still operated by a manual switch but the engine is now a car pump.
Test 2
At this point, number five was powered externally and controlled with a manual switch. Our final goal was to be able to walk number five in our neighborhood on Halloween, so we added batteries, electronic air flow controls, and a remote control.
Adding control units
The engine was an old portable air compressor for car tires that was super light and used little power. To make Number Five portable, it needed to run on a 12-volt battery which meant all the electronics had to run off of 12 volts as well. Luckily 12 volts is the standard power supply so finding the right parts wasn’t too difficult.
Adding the engine
At this point Number Five was completely self-contained and controlled by a remote. We moved the battery to the center of Number Five to give it a lower center of gravity. When we first put it together the first time it was clear it would fall over easily if the battery was on top. So we quickly built a lower platform that rested between the leg. The pump was light enough to stay in the back clear from the movement of the front legs.
Here is the first test of the fully remote Number Five. We had more slippage than we had in the prior tests; the weight of the battery and air pump impacted the wheel traction more than we expected. So back to tinkering…
The key improvements this time were:
A rubber wedge in the wheels made them only spin in one direction
Shifting more weight forward.
Extended the forward stretch of the front legs giving a lurching motion forward that was very effective on flat or downhill surfaces.
Taking Number Five for a Walk
After the modifications were complete, the sister team was ready to take Number Five for a walk in our neighborhood! Number Five worked well on the rough city sidewalks and could even manage to walk up a slight incline as shown in this clip. Downhill Number Five went almost too fast. We have learned a ton and stay tuned for the next modifications!
For high res videos of Number Five in action check out our YouTube Channel!
Where technology and beauty meet, our steampunk jewelry embraces the genius within! This collection of steampunk jewelry is fit for all steampunk-loving monsters. We were inspired by some of the cool steampunk gadgets in the books and movies that we have read/watched. Here are all of the books and movies that we were inspired by: Girl Genius, Secrets in the Mist, Howl’s Moving Castle, Clockwork Fairytales, Map to Everywhere, and Castle in the Sky.
Circle of Power Brooch
The Circle of Power brooch lights up to illuminate the center gemstone. It is two inches in diameter and has a magnetic attachment. To make this, we glued a Mancala gem on a gear and put it in a metal bottle cap. We then secured fairy lights around it and attached a lightweight battery to power them. You can easily turn on and off the fairy lights, and it is easy to replace the battery. The brooch is attached by very strong magnets, so you don’t have to poke holes in the thing that you are attaching it to.
Gears of Time
The Gears of Time choker is about six inches long and attached with a clasp. To make this, we sewed gears onto a normal black choker making sure they looked as if the meshed together and could work. To add depth and complexity we stacked gears on top of one another and used hot glue to secure them. We wanted the choker to fit tightly so it appear that you were peering into the inner workings of a robot.
The Hip Monsters team decided to make something that interests people when they walk into the room. Inspired by Girl Genius and this Steampunk creation, we made a mysterious steampunk contraption that only we know the use of.
Our amazing steampunk device.
This is our steampunk creation. It has two light bulbs, a pressure gauge, and some metal pipes. The light bulbs’ brightness is adjustable.
The side view
This is the side view of our device. You can see that on the side of the creation, there is a silver metal box. That controls the brightness of the lightbulbs.
The back view
On the back, you can see that there is a wire going from the silver box away from the device. that is where you plug in the device to the outlet. From the front it is barely noticeable, you can only see it from certain angles.
We saw the need for a new robot for halloween, so we made one. This is our steampunk squirrel powered robot Number Three. We wanted it to be as big as a kid to help with our Halloween decorations. Our other robots were small and not easy to see. Our plan was for a big robot with lights and room to grow as we came up with new ideas.
Please note, this material is provided for informational purposes only and is not a guide on how to create the designs. Please read our disclaimer.
Getting started
These are some of the parts that we used. We gathered most of it from unused parts from other projects. This project ended up being a great way to recycle old parts and scapes and it made it look even more steam-punky.
Scrape parts
We used PVC pipes for the skeleton of our robot because its strong and lightweight. Also we had fitting from remodeling that would attach to the pipes and let us hangs details. The pipes are standard so if we did need to buy anything it would be easy.
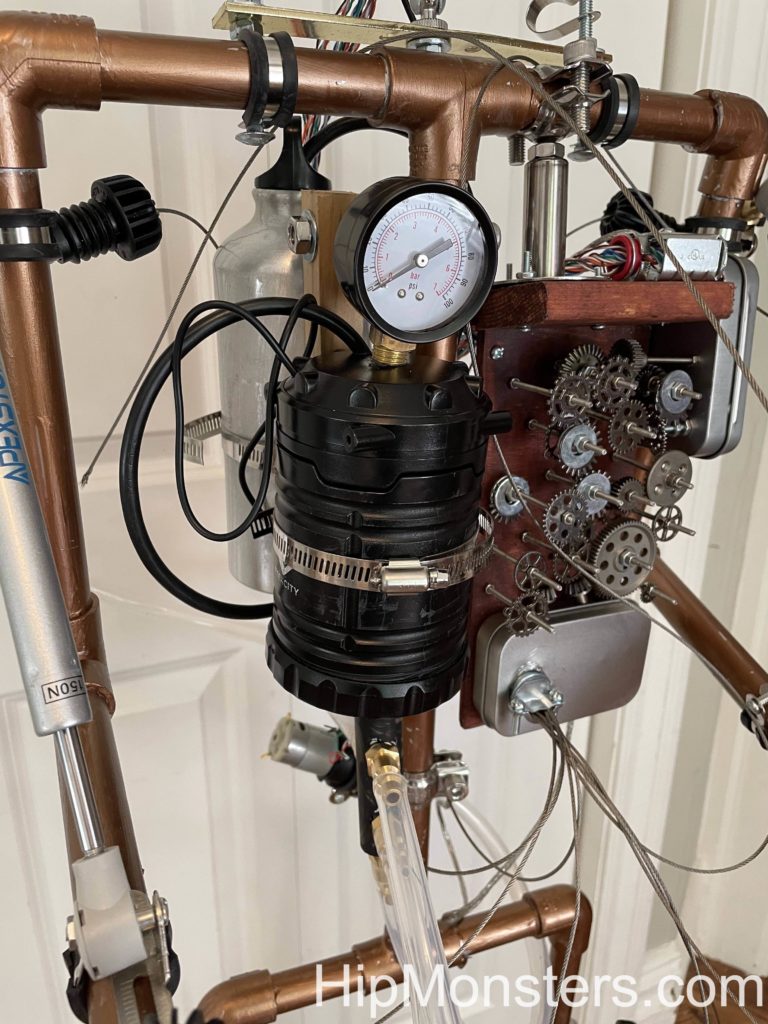
Completed Robot
The image to the right is the completed robot. The starting images ended up not as good as we expected so the final image was the best to show how the tubing was used. First, we cut the pipes to the right size using one of us to figure out lengths arms, legs and spine. Then we assembled it and added feet to keep it stable as we worked. The feet were harder than expected to get the right balance and weight. We used concrete bolts with extra washers as needed.
Then we assembled the PVC pipes and painted it with two coats. The first was sliver; the second was bronze. Next, we used an old security camera mount and attached a plastic jar on the neck. We added a toy squirrel inside and a few parts that looked like little controls for it. We named the squirrel Professor Brookenhoff.
For a fake engine core we used an old battery powered lantern connected to an old water bottle.
Assembling the gear box
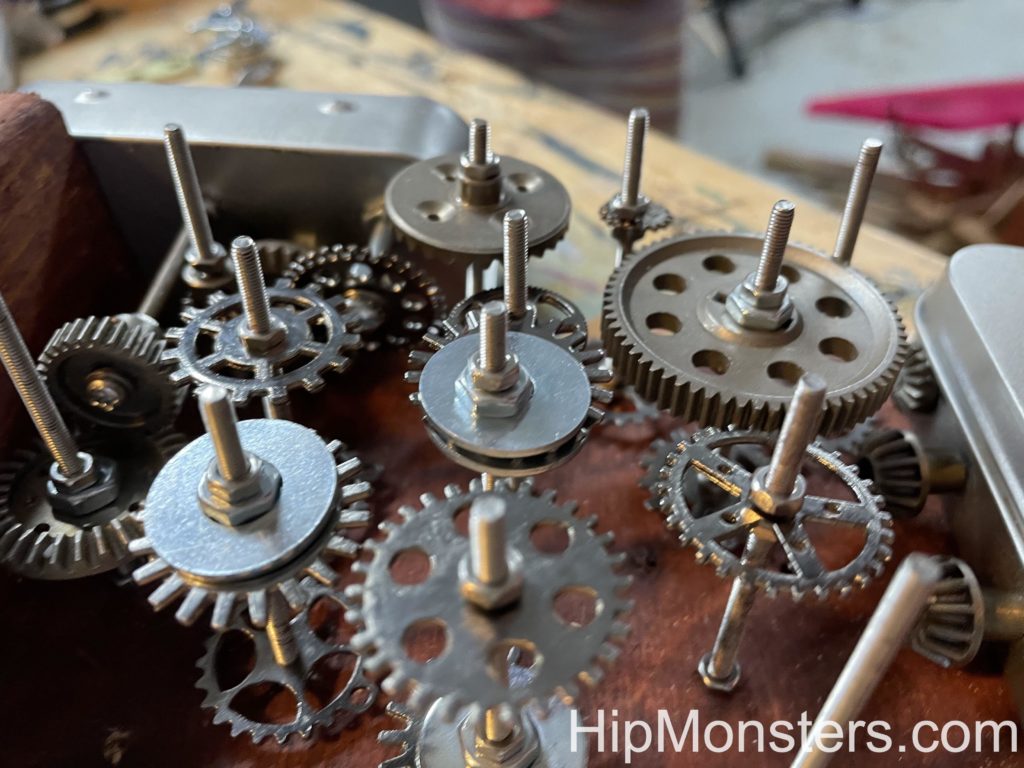
Now we started on the fake control box. To make is steampunk we used gears and only a few wires. Then we assembled the gears to control the robot. We used old wood as a base and stain and distressed it by hitting it with a hammer.
After that, we drilled a bunch of holes on the back and put thin, long bolts through them to create a framework for the gears. Before we assembled it we laid out the gears on the table in the pattern we wanted then transferred the gears to the rig. You must remember to lay out the gears in the opposite way you want them in the rig.
Side view of the gear box
Here is a view of gears completed with the control boxes on each side.
The gears took the most time and ended up being a lot harder than we imagined. It was difficult to screw the tiny nuts into place to give it a 3d look. Also, the bolts proved to be sharp. We attached some gears to the side of the control boxes so it would look like they actually controlled the gears.
Close up of the gear box
Then we attached a box to run the wirer through. We had a plan on the gears, engine, wire, pistons that we made before we started work that was our best attempt at design an honest working robot. The things we added is what Number Three would have needed if it was real.
Side view
We then added a second box next to the gears for attaching the control wires.
Close up
Here is a close up of the gears. Getting a 3-D design is important to make it look real. Each gear needs two bolts. One on top and one on the bottom. Make sure they are tightly screwed together.
Back view
Now we focused on putting on details that would make it look like Number Three could move. Since it was supposed to be steam powered we used four left over pistons. We attached pneumatic tubing to the pistons then attached the other end to the engine. The idea is the power from the engine would create steam, and Professor Brookenhoff would give commands to the gears which would send the steam to the right piston to make it move. The idea of the head came from Carmichael from The Umbrella Academy.
Close up of the feet
As we added more details to Number Three, we also needed to add more heavy things to the feet for stability.
Close up of the head
A close up of Professor Brookenhoff piloting Number Three.
Close up of the chest
A close up of the tubing from the engine to the joints.
Side View
Number Three from side view. Here you can see the hands which also ended up being hard to make. Finally we made the hands out of wires and springs so it can hold things.
































 Here is Number Six walking in our yard.
Here is Number Six walking in our yard.